|
R C O P T I C A L S Y S T E M S
Focus Control Software
|
RC Optical Systems 4025 E. Huntington Drive, Suite 105 Flagstaff, Arizona 86004 Phone 928-526-5380 Email - info@rcopticalsystems.com
Focus Control Software
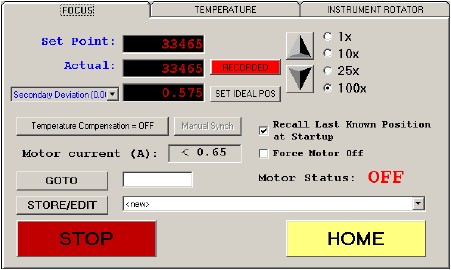
Use the controls on the Focus Tab to control the various functions of the secondary servo focuser.
There are three displayed focus positions: The 'Set Point', and 'Actual' positions display
the target and actual servo positions respectively, and are expressed in units of focus
counts. Each count corresponds to 1/40,000 inch of secondary mirror movement. The third
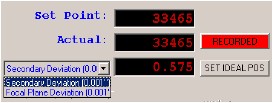
displayed position is a representation of the offset from ideal mirror spacing, and can be
displayed in terms of mirror spacing (Secondary Deviation) or offset at the focal plane (Focal
Plane Deviation), and is displayed in units of 0.001 inch. To display the offset from ideal
mirror spacing, the ideal mirror spacing must first be determined and set for your telescope.
This position is unique for each telescope and is specified in the ideal backspace from the
telescope's back plate. To set the ideal focus position the focuser must first be in absolute
mode by first homing. Using appropriate spacers, determine the focus count that brings a star
into focus at the ideal backspace position. Click the 'Set Ideal Pos' button to store this
position in the TCC's non-volatile memory. This position need only be set once. Thereafter,
whenever the focuser is in absolute mode the offset from ideal focus position will be
displayed. For the TCC to accurately display the offset at the focal plane, the focal plane
step size for your telescope must be determined and set. Choose menu item Tools->Options and
click the focuser tab. Enter the step size for your telescope if known, or use the provided
calculator. See focuser options for more details. See understanding the servo focuser for a
more complete description servo control systems.
Pressing the up/down buttons will increase/decrease the focus position by the amount selected
to the right of the buttons. Keeping the buttons depressed will cause movement commands to be
repeated three times per second for five counts then 20 times per second thereafter, thus
allowing large positions changes to be made rapidly.
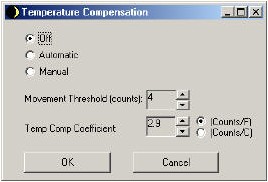
The TCC has the ability to compensate for temperature dependent focus shift. To setup and use
temperature compensation, click the 'Temperature Compensation' button to display the following
window:
Before use, the Movement Threshold and Temperature Compensation Coefficient must be set. The
temperature compensation coefficient corresponds to the number of focus counts the focus point
shifts per degrees F or C. This coefficient can be either positive or negative and must be
determined experimentally for your individual setup (telescope, accessories, mounting plate,
etc). The movement threshold is the minimum counts that the focuser will move during
temperature compensation. If the calculated temperature compensation is less than the set
threshold, then this amount is added to the result of the next calculation. The use of a
movement threshold will prevent the focuser from constantly adjusting to minor changes in
ambient temperature.
Temperature compensation can be disabled or set to run in either automatic or manual mode. In
Automatic mode, temperature compensation is calculated every 30 seconds, and an adjustment is
made if it exceeds the movement threshold. The temperature used in calculating the
temperature compensation is a 5 minute running average of the ambient temperature. This
average temperature helps to eliminate the effects of short lived variations in temperature,
and more closely matches the temperature time constants of components that contract and expand
the optical path. In Manual mode, temperature compensation is calculated only in response to
clicking the 'Manual Synch' button. This mode is useful to prevent focuser movement during an
exposure.
NOTE: In compliance with the ASCOM standard, focusing is disabled when temperature
compensation is active. If the focuser is commanded to move either by the hand controller or
via computer an error will be displayed.
To move to a specific location, type the desired position in the text box next to the  button
then press the button. Absolute positioning is only available after the focuser has either
been commanded to seek the HOME position or the TCC started with 'Recall Last Know Focus
Position' active. button
then press the button. Absolute positioning is only available after the focuser has either
been commanded to seek the HOME position or the TCC started with 'Recall Last Know Focus
Position' active.
To move to a previously stored position, choose the entry in the drop down list of saved
positions and confirm your intent when prompted. If temperature compensation has been set up
for your TCC then you will be prompted to temperature compensate the stored position. Each
stored position is paired with the ambient temperature at the time of storage. If the
temperature at the time of recall is significantly different, and your telescope exhibits
temperature dependant focus shift, then the stored position may not be accurate. If desired,
the TCC will compensate for temperature shift that results from the temperature difference.
For example, if your telescope exhibits a focus shift of 5 counts/degree and a position is
stored with a corresponding temperature of 50 F and it is being recalled when the temperature
is 70 F, the TCC will compensate by (70F-50F)*5 (counts/F)=100 counts. Absolute positioning is
only available after the focuser has either been commanded to seek the HOME position or the
TCC started with 'Recall Last Know Focus Position' active.
To store the current position or edit a previously stored position, press the  which will
launch the Store Position dialog box. Please refer to Storing and Editing Focus Positions for
details of this operation. which will
launch the Store Position dialog box. Please refer to Storing and Editing Focus Positions for
details of this operation.
Pressing the  button will command the TCC to slew to its mechanical home position. The home
position is a precise, highly repeatable mechanical stop at the focus actuator's fully
retracted position. Upon reaching the home position the position counts are set to 0 then the
motor is backed away 20 counts to remove any mechanical strain. Using the home position as a
reference point allows repeatable positioning between observing sessions, that is, positioning
is Absolute. Once in absolute positioning mode, the TCC can be commanded to move to
previously stored positions or to any absolute position by use of the button.
NOTE: The TCC
needs to be commanded to the home position only once after power up. This command can be
issued either via software or through the TCC hand controller. The TCC software will detect
the positioning mode (Absolute/Relative) upon start up and enable the absolute positioning
options accordingly. If the TCC is started with 'Recall Last Known Position at Startup'
enabled, then it will be in absolute mode and homing is not necessary. button will command the TCC to slew to its mechanical home position. The home
position is a precise, highly repeatable mechanical stop at the focus actuator's fully
retracted position. Upon reaching the home position the position counts are set to 0 then the
motor is backed away 20 counts to remove any mechanical strain. Using the home position as a
reference point allows repeatable positioning between observing sessions, that is, positioning
is Absolute. Once in absolute positioning mode, the TCC can be commanded to move to
previously stored positions or to any absolute position by use of the button.
NOTE: The TCC
needs to be commanded to the home position only once after power up. This command can be
issued either via software or through the TCC hand controller. The TCC software will detect
the positioning mode (Absolute/Relative) upon start up and enable the absolute positioning
options accordingly. If the TCC is started with 'Recall Last Known Position at Startup'
enabled, then it will be in absolute mode and homing is not necessary.

Check 'Recall Last Known Position at Startup' to have the TCC automatically save its focus
position at power down and recall this position at next power up. This function is only
available if the TCC is in absolute mode by Homing or being started from a last known
position. The TCC will automatically store a position once it hasn't changed for
approximately 3 minutes. When the position is stored the text on the RECORD button will
change to  . When the position is changed the stored position is invalidated and the RECORD
button will change to . When the position is changed the stored position is invalidated and the RECORD
button will change to  . If the TCC is powered down with an invalidated position it will start
up with a position of 0 and will require homing to be in absolute mode. To force the current
position to be stored prior to the 3 minute timeout press the RECORD button. . If the TCC is powered down with an invalidated position it will start
up with a position of 0 and will require homing to be in absolute mode. To force the current
position to be stored prior to the 3 minute timeout press the RECORD button.
Pressing  will stop the motor at its current position. This is useful for aborting a slew to
home or to a stored position. will stop the motor at its current position. This is useful for aborting a slew to
home or to a stored position.
The instantaneous motor current is displayed during a slew and during position maintenance.
During normal operation the motor current should read '<0.65' after reaching the desired
position. In situations of increased mechanical resistance (such as at the end of secondary
actuator travel) increased current may be necessary to maintain the desired position.
Prolonged over current can cause heating of the servo motor which will have undesirable
optical effect. By default the motor will turn off during these situations. Please see
focuser options for details on focuser configuration.
Checking  will turn the motor off and disable any motion command being issued from the
software. This is useful to prevent inadvertent focus change during imaging. NOTE:
Checking
will not disable focusing by the TCC hand controller or by any other linked ASCOM session
such as an autofocus plugin. The Motor Status is displayed beneath this check box and
indicate either ON or OFF. The motor can be turned off either manually by checking or it can
be set to turn off automatically when the focus position falls within the deadband range of
the Set Point. Excessive position error or over current condition will also result in the
motor being turned off. See focuser options to learn how to configure the focuser. will turn the motor off and disable any motion command being issued from the
software. This is useful to prevent inadvertent focus change during imaging. NOTE:
Checking
will not disable focusing by the TCC hand controller or by any other linked ASCOM session
such as an autofocus plugin. The Motor Status is displayed beneath this check box and
indicate either ON or OFF. The motor can be turned off either manually by checking or it can
be set to turn off automatically when the focus position falls within the deadband range of
the Set Point. Excessive position error or over current condition will also result in the
motor being turned off. See focuser options to learn how to configure the focuser.
Focus Control Software | Modified on July 17, 2005 Copyright © 2003 RC Optical Systems All Rights Reserved
|